Proposed Title :
A Encoding and Decoding Process for short BCH Code with High Decoding Efficiency and Low Power for Emerging Memories
Improvement of this Project:
To Develop a VHDL code for DEC-TED(Double Error Corrector-Triple Error Detector) BCH Code for encoding and decoding process for data width 84.
Software implementation:
- Modelsim
- Xilinx
Proposed System:
The Spin-transfer torque magneto resistive random access memory(SST_MRAM) Emerging memories are considered to be the promising candidate embedded memories due to their fast and write latencies, low leakage power, and logic-friendly compatibility. As technology scales down, these emerging memories are also struggling with reduced reliability, and as a solution, error-correcting code and its encoder and decoder circuits have been applied. Therefore, this paper proposes the efficient Double Error Corrector and Triple Error Detector (DEC-TED) Bose-Chaudhuri-Hocquenghem (BCH) decoder with high efficiency and low power for emerging memories are presented. The proposed efficient double error corrector and triple error detector includes the blocks of syndrome generator, error counter, single error corrector, double error corrector and error correction. The adaptive error correction technique is proposed for double error corrector and triple error detector BCH code to detect the number of error in the codeword immediately after the syndrome generation and checks the error of the code word based on the error which depends upon the different error correction algorithm which are used in the proposed decoding technique. This adaptive error correcting technique reduces the power consumption and increases the decoding efficiency compared to existing decoding technique. The invalid transition inhibition technique is implemented to remove the invalid transition caused by the glitches of the syndrome vectors in the error finding block. Thus, reduces the further more power consumption in the decoding technique. Finally, theses technique is implemented in the VHDL and synthesized in the XILINX FPGA-S6LX9 and shown the comparison in terms of area, power and delay reports.
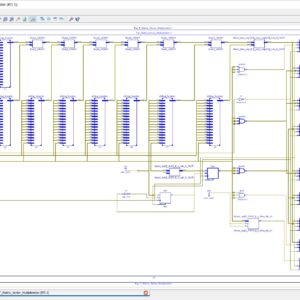
PROPOSED HIGH-DECODING-EFFICIENCY AND LOW-POWER DEC-TED BCH DECODER
In this section, a DEC-TED BCH decoder using an adaptive error correction and an invalid transition inhibition technique is proposed to achieve the high decoding efficiency and low-power consumption.
As an example, let us consider a simple BCH code. In this case, the three parity check bits p0, p1, p2, p3, p4, p5, p6, p7, p8, p9, p10 are computed as a function of the data bits d1, d2, d3, d4, d5, d6, d7, d8, d9, d10, d11, d12 as follows:
P0 = d1 + d2 + d3 + d4 + d5 + d6 + d7 + d8 + d9 + d10 + d11
P1 = d1 + d2 + d3 + d4 + d5 + d6 + d7 + d8 + d9 + d10 + d12
P2 = d1 + d2 + d3 + d4 + d5 + d6 + d7 + d8 + d9 + d11 + d12
P3 = d1 + d2 + d3 + d4 + d5 + d6 + d7 + d8 + d10 + d11 + d12
P4 = d1 + d2 + d3 + d4 + d5 + d6 + d7 + d9 + d10 + d11 + d12
P5 = d1 + d2 + d3 + d4 + d5 + d6 + d8 + d9 + d10 + d11 + d12
P6 = d1 + d2 + d3 + d4 + d5 + d7 + d8 + d9 + d10 + d11 + d12
P7 = d1 + d2 + d3 + d4 + d6 + d7 + d8 + d9 + d10 + d11 + d12
P8 = d1 + d2 + d3 + d5 + d6 + d7 + d8 + d9 + d10 + d11 + d12
P9 = d1 + d2 + d4 + d5 + d6 + d7 + d8 + d9 + d10 + d11 + d12
P10 = d1 + d3 + d4 + d5 + d6 + d7 + d8 + d9 + d10 + d11 + d12
” Thanks for Visit this project Pages – Buy It Soon “
A Decoder for Short BCH Codes With High Decoding Efficiency and Low Power for Emerging Memories
“Buy VLSI Projects On On-Line”
Terms & Conditions:
- Customer are advice to watch the project video file output, before the payment to test the requirement, correction will be applicable.
- After payment, if any correction in the Project is accepted, but requirement changes is applicable with updated charges based upon the requirement.
- After payment the student having doubts, correction, software error, hardware errors, coding doubts are accepted.
- Online support will not be given more than 3 times.
- On first time explanations we can provide completely with video file support, other 2 we can provide doubt clarifications only.
- If any Issue on Software license / System Error we can support and rectify that within end of the day.
- Extra Charges For duplicate bill copy. Bill must be paid in full, No part payment will be accepted.
- After payment, to must send the payment receipt to our email id.
- Powered by NXFEE INNOVATION, Pondicherry.
Payment Method :
- Pay Add to Cart Method on this Page
- Deposit Cash/Cheque on our a/c.
- Pay Google Pay/Phone Pay : +91 9789443203
- Send Cheque through courier
- Visit our office directly
- Pay using Paypal : Click here to get NXFEE-PayPal link
Bank Accounts
HDFC BANK ACCOUNT:
- NXFEE INNOVATION,
HDFC BANK, MAIN BRANCH, PONDICHERRY-605004.
INDIA,
ACC NO. 50200013195971,
IFSC CODE: HDFC0000407.