Proposed Title :
FPGA Implementation of High Performance FIR filter design with using Distributed Arithmetic based Approximate Sum of Products.
Improvement of this Project:
To design 16-Tap FIR Filter design using a method of Approximate circuit in ASOP1, ASOP2, ASOP3, finally compared with this ASOP’s to shown the FIR Filter performance in terms of Area, delay and power.
Software implementation:
- Modelsim & Xilinx
Proposed System:
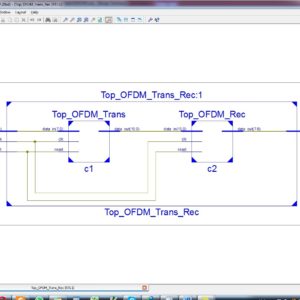
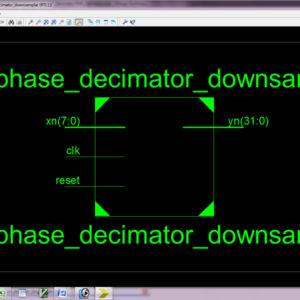
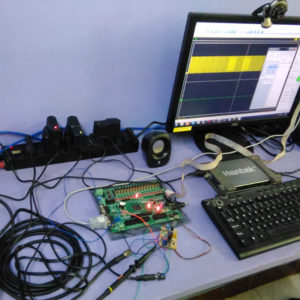
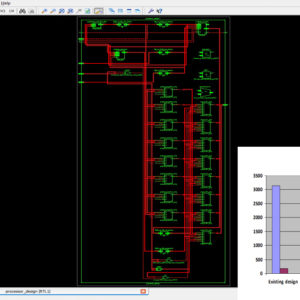
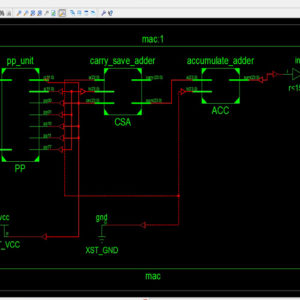
In a recent research of Approximate computing will provide a long lost bit error rate and also provide a power efficient with less area in digital signal processing applications. In a key component of arithmetic operations, a SOP (Sum of Product) method will have priority in approximate implementations such as calculation of inner products between vector based arithmetic operations. Here a arithmetic operation of approximate sum of product (ASOP) method will designed in three type of method in SOP Structure of K=3, N=16, these method will support without using multiplier design, such as 1) Generic method of ASOP1, 2) Priority encoder method of ASOP2, 3) Multi-Operation with truncated 18-m bits method of ASOP3. In this proposed work of this paper will implement this ASOP1, ASOP2, ASOP3 with using FIR Filter design, and shown the performance with this three method, and finally design this logic on VHDL and implemented with Xilinx FPGA-S6lx9, and shown the performance in terms of area, delay and power.
” Thanks for Visit this project Pages – Buy It Soon “
Approximate Sum-of-Products Design Based on Distributed Arithmetic
“Buy VLSI Projects On On-Line”
Terms & Conditions:
- Customer are advice to watch the project video file output, before the payment to test the requirement, correction will be applicable.
- After payment, if any correction in the Project is accepted, but requirement changes is applicable with updated charges based upon the requirement.
- After payment the student having doubts, correction, software error, hardware errors, coding doubts are accepted.
- Online support will not be given more than 3 times.
- On first time explanations we can provide completely with video file support, other 2 we can provide doubt clarifications only.
- If any Issue on Software license / System Error we can support and rectify that within end of the day.
- Extra Charges For duplicate bill copy. Bill must be paid in full, No part payment will be accepted.
- After payment, to must send the payment receipt to our email id.
- Powered by NXFEE INNOVATION, Pondicherry.
Payment Method :
- Pay Add to Cart Method on this Page
- Deposit Cash/Cheque on our a/c.
- Pay Google Pay/Phone Pay : +91 9789443203
- Send Cheque through courier
- Visit our office directly
- Pay using Paypal : Click here to get NXFEE-PayPal link