Proposed Title :
An Efficient and High Performance VLSI Architecture of DWT Using Truncation MAC
Improvement of this Project:
To implement the 2D_DWT(Discrete Wavelet Transform) using Truncation MAC(Multiple Access Accumulator).
Software implementation:
- VHDL
Proposed System:
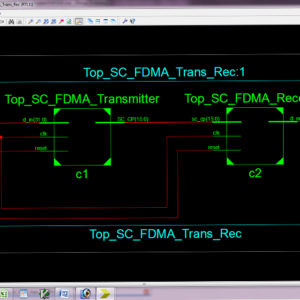
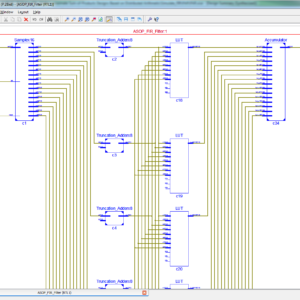
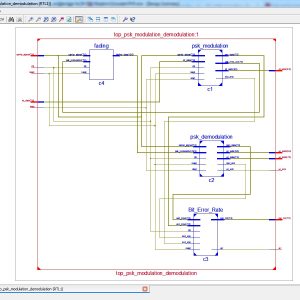
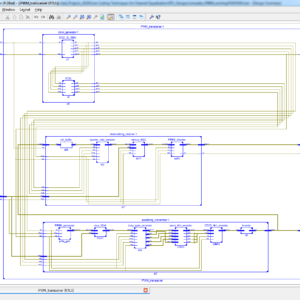
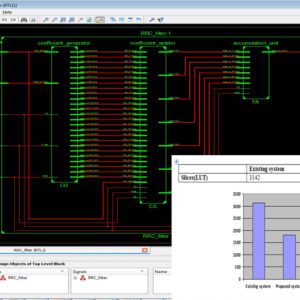
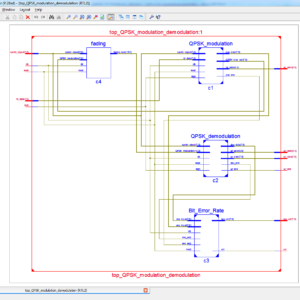
In functional and numerical analysis , a (DWT) discrete wavelet transform is any wavelet transform for which the wavelets are sampled discretely. In recent research of application of Image Processing there is a demand in high performance and efficient Discrete Wavelet Transform. This paper proposes the new design concept of high performance and efficient Discrete wavelet transform in order to overcome the problem faced in the recent research. The Truncation (MAC) multiply accumulate circuit based on the 2D-DWT is used in the proposed system of this paper, where the high pass and low pass FIR filters output are determined using the MAC. The existing system of DWT uses the concept of Floating point MAC which consumes larger area and its performance was low. Therefore, the proposed technique of DWT using Truncation MAC which achieves a better performance and reduces the area size when compared to existing Floating point MAC concept. The proposed DWT technique with Truncation MAC is implemented in the VHDL and synthesized in the XILINX and compared in terms of area, power and delay reports.
” Thanks for Visit this project Pages – Buy It Soon “
An Efficient VLSI Architecture for Convolution Based DWT Using MAC
“Buy VLSI Projects On On-Line”
Terms & Conditions:
- Customer are advice to watch the project video file output, before the payment to test the requirement, correction will be applicable.
- After payment, if any correction in the Project is accepted, but requirement changes is applicable with updated charges based upon the requirement.
- After payment the student having doubts, correction, software error, hardware errors, coding doubts are accepted.
- Online support will not be given more than 3 times.
- On first time explanations we can provide completely with video file support, other 2 we can provide doubt clarifications only.
- If any Issue on Software license / System Error we can support and rectify that within end of the day.
- Extra Charges For duplicate bill copy. Bill must be paid in full, No part payment will be accepted.
- After payment, to must send the payment receipt to our email id.
- Powered by NXFEE INNOVATION, Pondicherry.
Payment Method :
- Pay Add to Cart Method on this Page
- Deposit Cash/Cheque on our a/c.
- Pay Google Pay/Phone Pay : +91 9789443203
- Send Cheque through courier
- Visit our office directly
- Pay using Paypal : Click here to get NXFEE-PayPal link