
Proposed Title :
An Efficient Approach of Fast Transient DC-DC Convertor using Multiloop Control
Improvement of this Project:
-
-
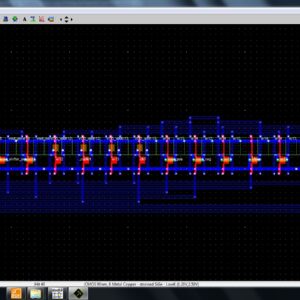
Design of fast transient DC-DC convertor implemented in 45nm CMOS technology, and vary input voltage 2.6V ~ 4.2V.
-
Software implementation:
- TANNER EDA
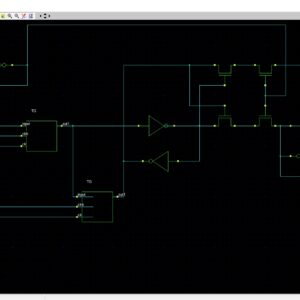
Proposed System:
Step-down method of DC -to-DC power converter it is called Buck Converter. The operation of electromechanical device of DC-DC converter is converts direct current (DC) from certain level of input voltage to another voltage level. This paper proposes the novel design implementation of fast transient response current-mode buck converter with ac coupled feedback (ACCF). Where, ACCF is the modified design of a conventional Capacitor multiplier. The previous method of DC to DC Converters requires more power to achieve the fast transient to voltage conversion and it has high electromagnetic interface (EMI) noise. To overcome this problem this work presents a novel design of DC-DC converter with ACCF. ACCF circuit used to eliminate the bulky soft-start circuit when the ramping speeds of the output voltage during power-up. A Present Proposed system uses current mode- controller to improve response in speed and also increasing load transient voltages. The proposed scheme has been implemented in input voltage 2.6V ~ 4.2V and 45nm CMOS technology and compared in terms of Voltage, power, area and delay of the DC-DC converter will be calculated.
” Thanks for Visit this project Pages – Buy It Soon “

 1")
